

点群、3Dデータ
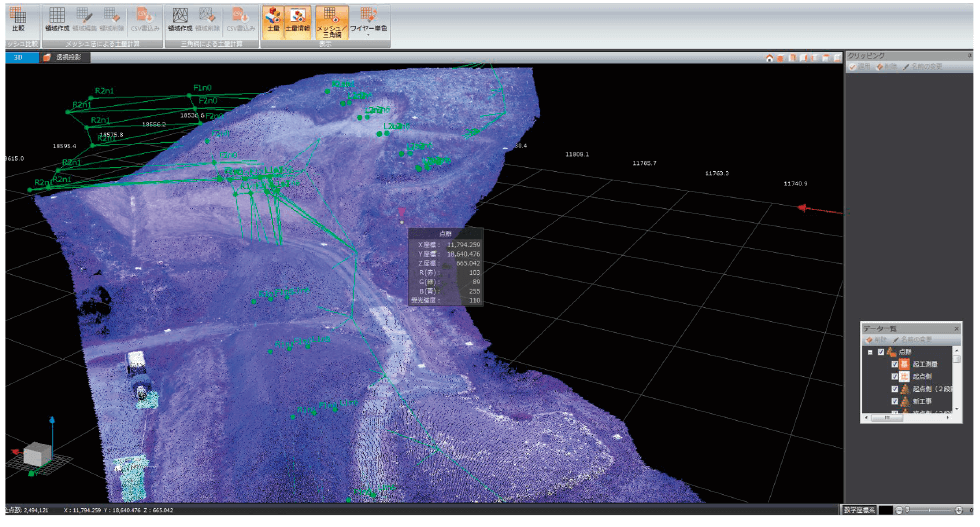
写真地図作成では、数値地形モデルと写真地図データファイルが作成されますが、UAV を用いた空中写真による三次元点群測量では、数値地形モデルと写真地図データが一体となったともいえる空中写真の色を属性とす る三次元の座標、いわゆる三次元点群データを成果とし、必要に応じて三次元点群データか らグリッド形式、テクスチャー付きの不整三角網、 写真地図を作成することも可能です。
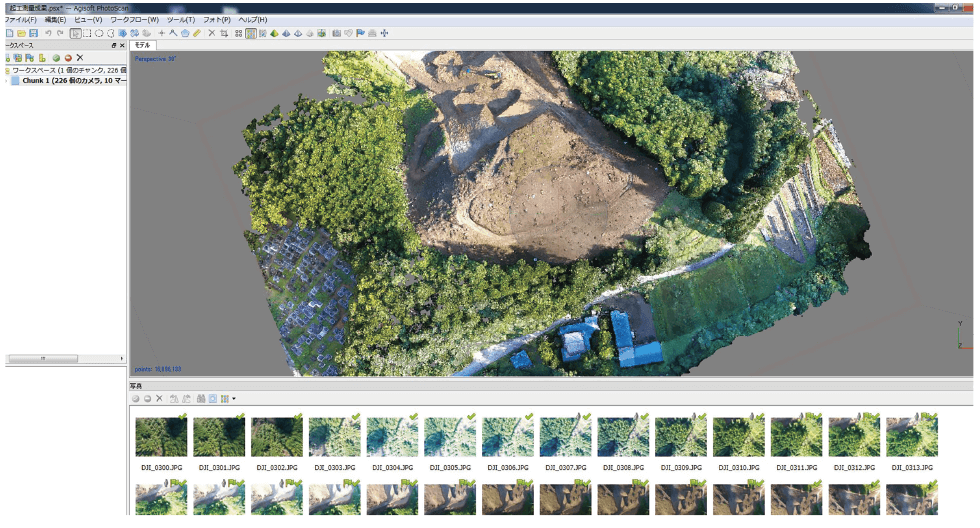
三次元形状復元では、最初に同時調整に相当する処理が行われる。つまり、パスポイント・ タイポイントに変わるものとして、地形・地物の特徴的な場所が特徴点として自動抽出され、 重複する空中写真間で同一となる特徴点の対応付けが行われ、空中写真の外部標定要素が計算される。次に、外部標定要素によって明確になった空中写真間の関係を利用し、特徴的な 場所以外でも重複する空中写真間で同一となる場所の対応付けが行われ、外部標定要素を用いて三次元座標に変換されるとともに、その場所の空中写真の色が属性として付与される。 さらに、三次元座標を何らかの基準に従って品質を評価し、誤対応しているものを除去するフィルタリング作業も行います。
このように重複する空中写真間で同一場所を自動的に対応付けするには、地形・地物の写り込み方の違いが少ない接近して撮影された空中写真、つまり重複度が大きい空中写真ほど容易となります。従って撮影では、空中写真測量でオーバーラップと呼ばれる UAV の進行方向 (コース) に撮影された空中写真間の重複、サイドラップと呼ばれる隣接する UAV の撮影コース間の重複は、空中写真測量に較べて非常に大きくしています。
また、自動処理によって同一場所が対応付けられた空中写真を地上と関係付けるために、 水平位置と標高を持つ標定点を設置するとともに、その位置が分かるように対空標識が設置されます。このとき同一場所の対応付けがどのくらい堅ろうに行われているかの判断が困難なため、堅ろうさに欠ける場所における空中写真の連結度合の弱さを補うためにも標定点を設置することを規定しています。
三次元形状復元では、最初に同時調整に相当する処理が行われる。つまり、パスポイント・ タイポイントに変わるものとして、地形・地物の特徴的な場所が特徴点として自動抽出され、 重複する空中写真間で同一となる特徴点の対応付けが行われ、空中写真の外部標定要素が計算される。次に、外部標定要素によって明確になった空中写真間の関係を利用し、特徴的な 場所以外でも重複する空中写真間で同一となる場所の対応付けが行われ、外部標定要素を用いて三次元座標に変換されるとともに、その場所の空中写真の色が属性として付与される。 さらに、三次元座標を何らかの基準に従って品質を評価し、誤対応しているものを除去するフィルタリング作業も行います。
このように重複する空中写真間で同一場所を自動的に対応付けするには、地形・地物の写り込み方の違いが少ない接近して撮影された空中写真、つまり重複度が大きい空中写真ほど容易となります。従って撮影では、空中写真測量でオーバーラップと呼ばれる UAV の進行方向 (コース) に撮影された空中写真間の重複、サイドラップと呼ばれる隣接する UAV の撮影コース間の重複は、空中写真測量に較べて非常に大きくしています。
また、自動処理によって同一場所が対応付けられた空中写真を地上と関係付けるために、 水平位置と標高を持つ標定点を設置するとともに、その位置が分かるように対空標識が設置されます。このとき同一場所の対応付けがどのくらい堅ろうに行われているかの判断が困難なため、堅ろうさに欠ける場所における空中写真の連結度合の弱さを補うためにも標定点を設置することを規定しています。
三次元点群測量
3Dデータ

